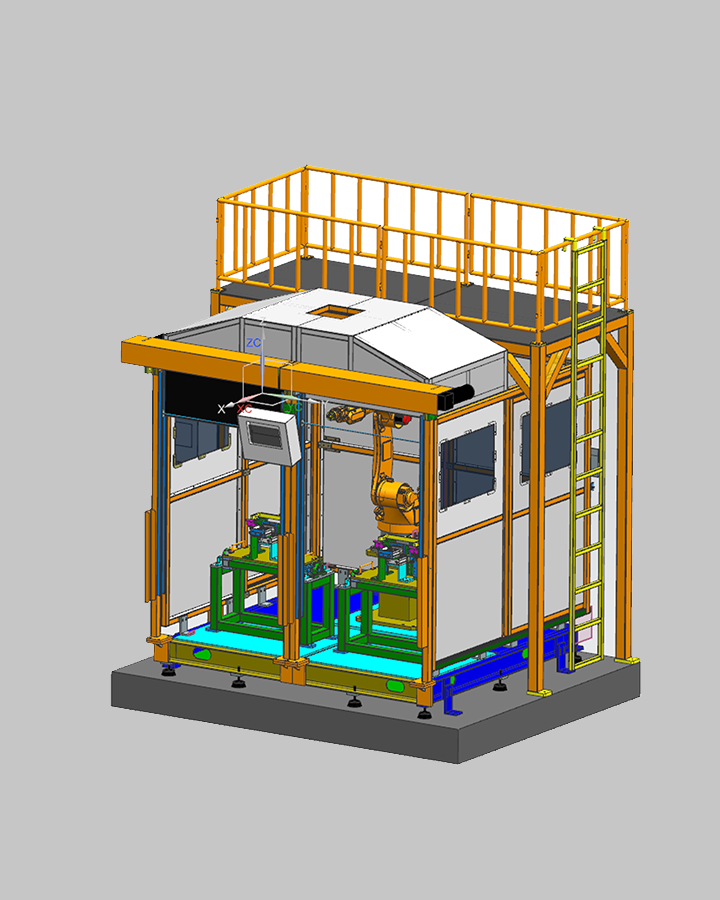
焊接&搬运系统
特点:伺服焊钳+抓手,工序间转运,减少产线配员
项目图片
PICTURES

项目简介
INTRODUCTION
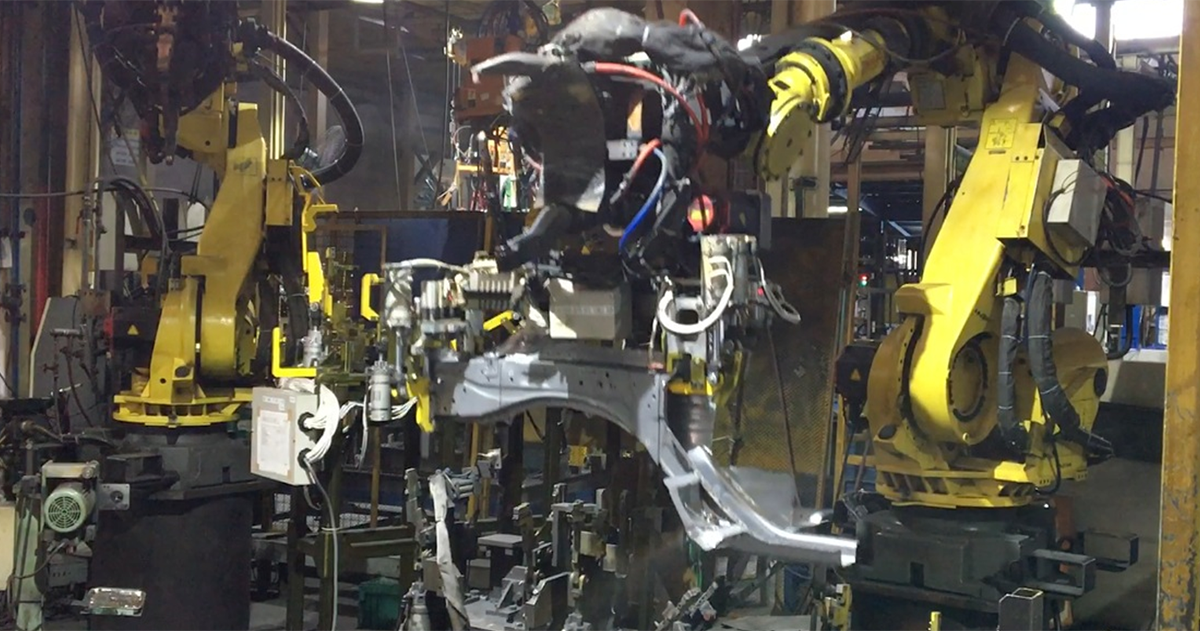
后纵梁部品拼装后体积大重量较重,工序间人工搬运劳动强度大,在点焊机器人上加装抓手实现工序间的自动搬运达到降低人员劳动强度及减少作业人数的效果。
PICTURES
INTRODUCTION
后纵梁部品拼装后体积大重量较重,工序间人工搬运劳动强度大,在点焊机器人上加装抓手实现工序间的自动搬运达到降低人员劳动强度及减少作业人数的效果。