全自动车身件焊接产线
特点:AGV运送,3D视觉抓取,机器人搬运、码垛,无人化生产
项目图片
PICTURES





项目简介
INTRODUCTION
采用机器人3D视觉实现自动抓取单品组装件、自动转运
点焊与弧焊工序相结合,配合多抓手倒装搬运机器人实现全自动生产
主控系统采用PLC组建以太网通过工厂局域网实现AGV调度及生产信息传输
控制系统特点
FEATURE
智能化:视觉传感、压力传感、伺服控制
信息化:生产信息管理传输、设备状态信息传输管理、设备维护保养信息管理
网络化:Robot Link、Ethernet/IP、DeviceNet、CompBus等多层网络系统分层控制
机器人自动化:3D视觉定位技术、DCS安全区域控制、多品种抓手集成、全自动电极更换、装框码垛
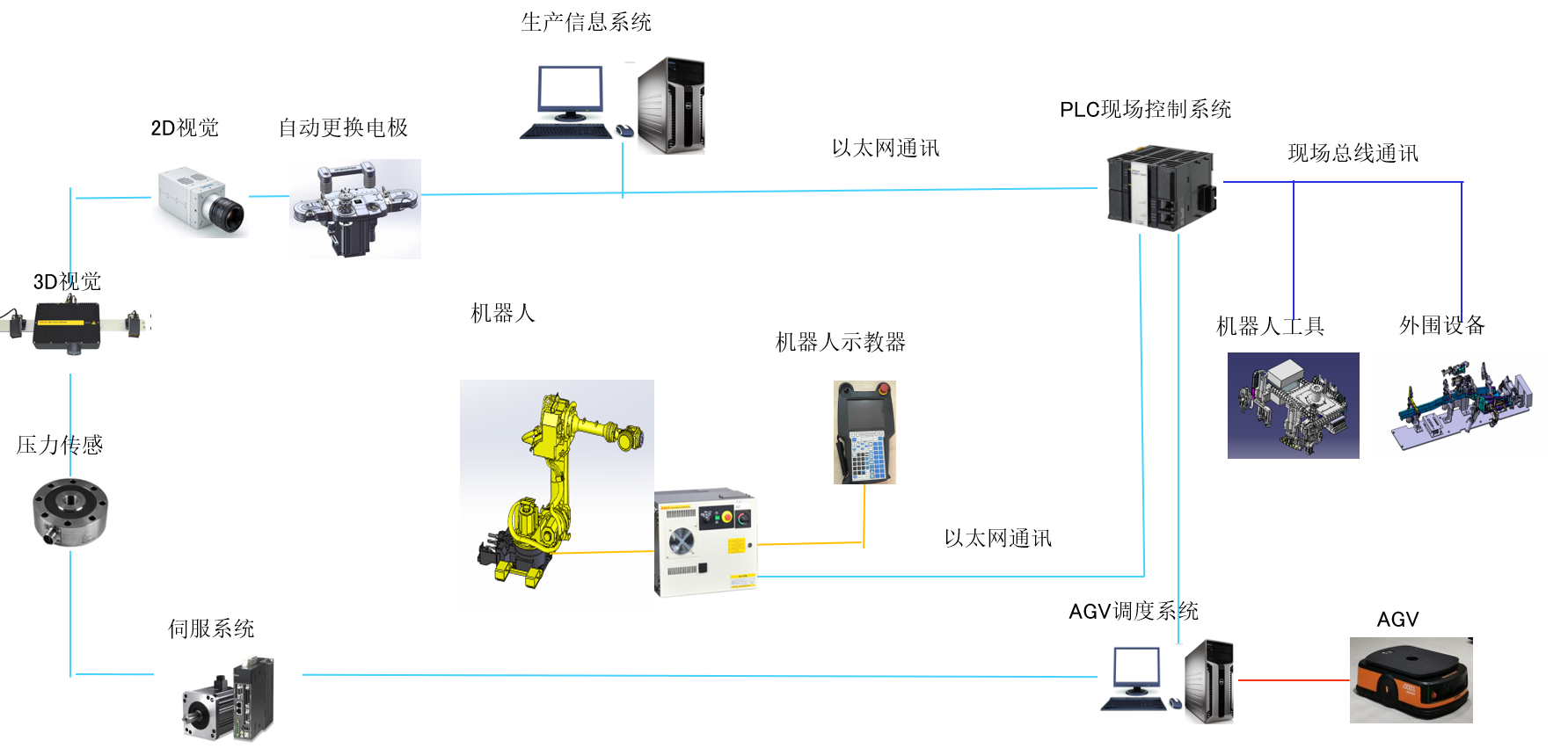
控制系统结构
STRUCTURE