点焊机器人系统
特点:双工位设置,零装件等待,四面回转轴,四种产品快速切换
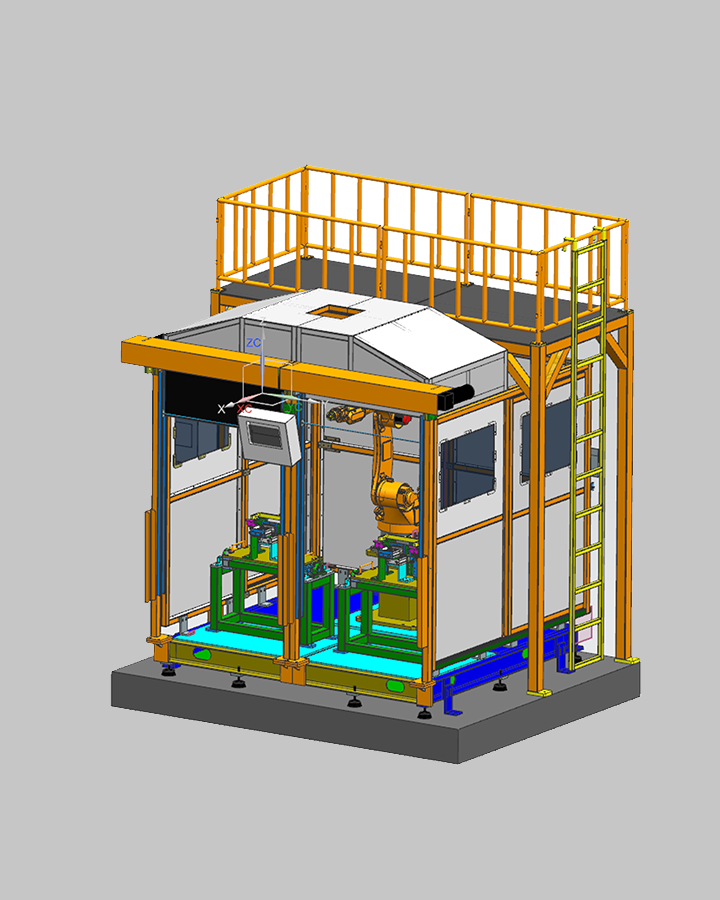
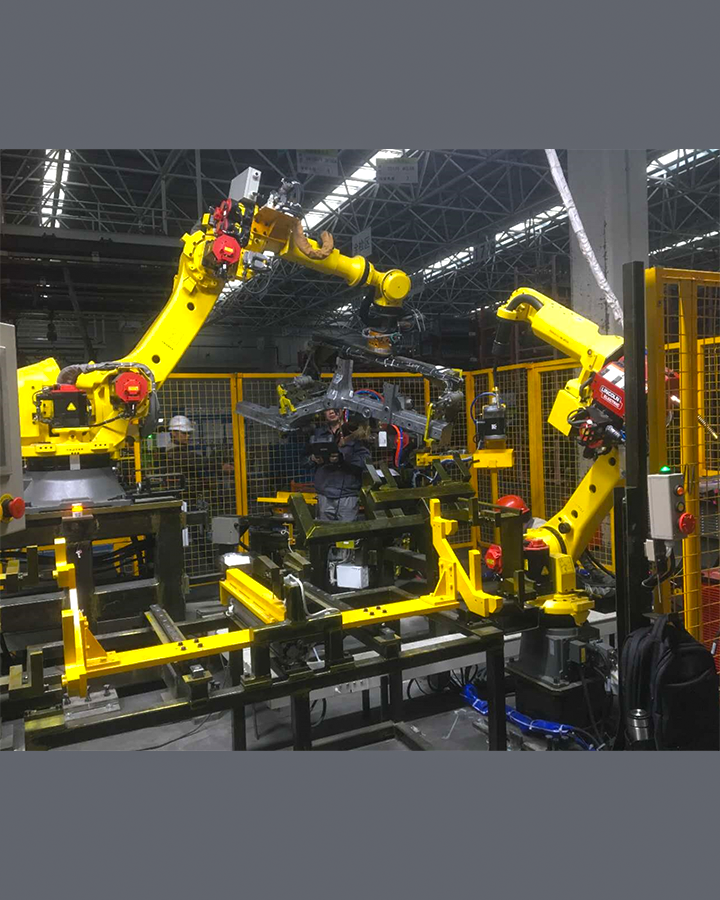
项目图片
PICTURES


项目简介
INTRODUCTION
点焊机器人系统在车身焊接领域应用广范,我司多年来承接了大量此类系统的设计制作及调试项目,我司制作集成系统特点如下:
系统配备两个四面回转(2工位),每个回转轴可同时搭载4套夹具,实现快速车型切换。
双机器人双工位系统可通过合理的点位分配两机器人同时生产一个工位实现“0”装件时间损耗提高生产效率。
主控系统采用PLC控制,网络构成有:Ethernet/IP、DeviceNet、CompBus对设备不同部分进行分层控制及连接工厂局域网。
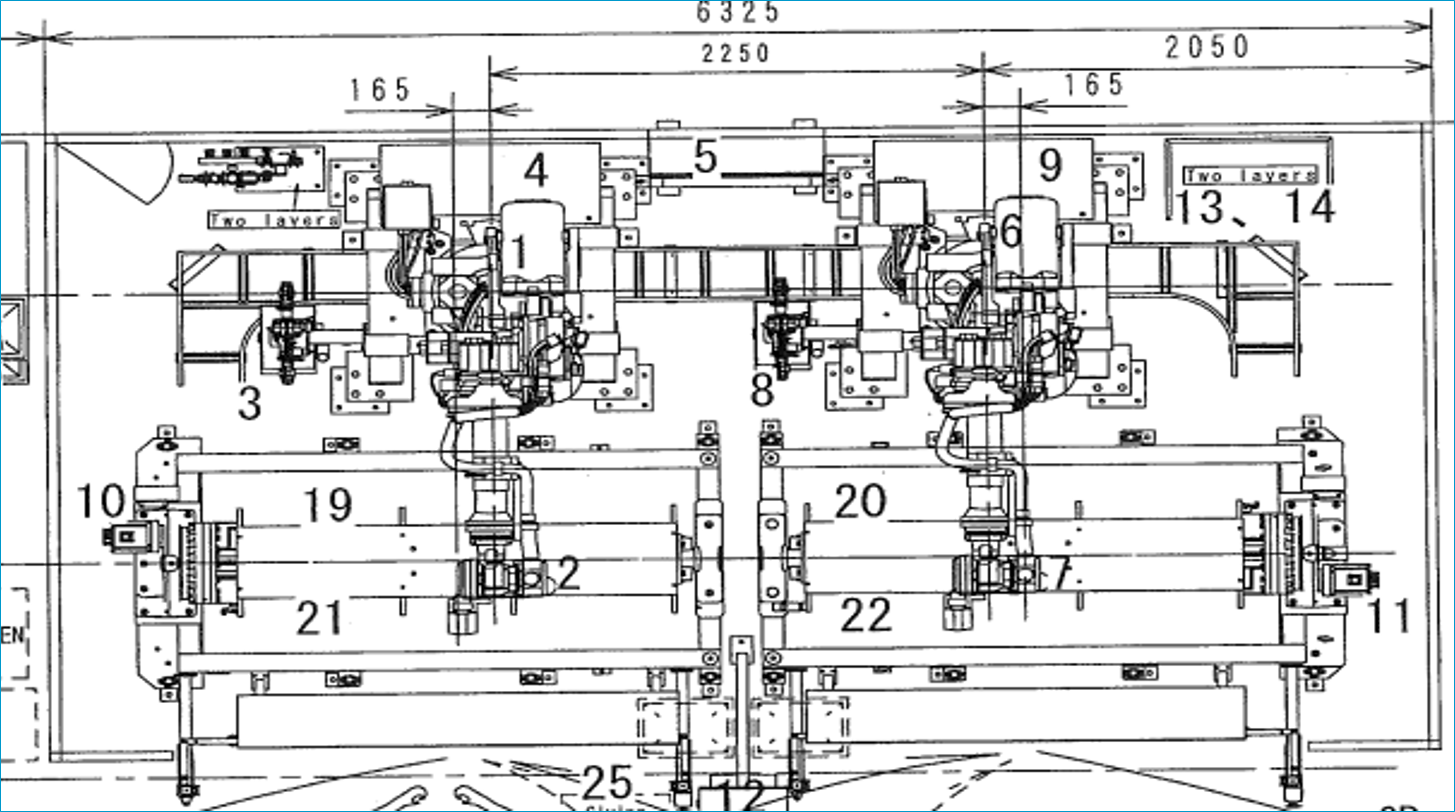
系统布局
LAYOUT
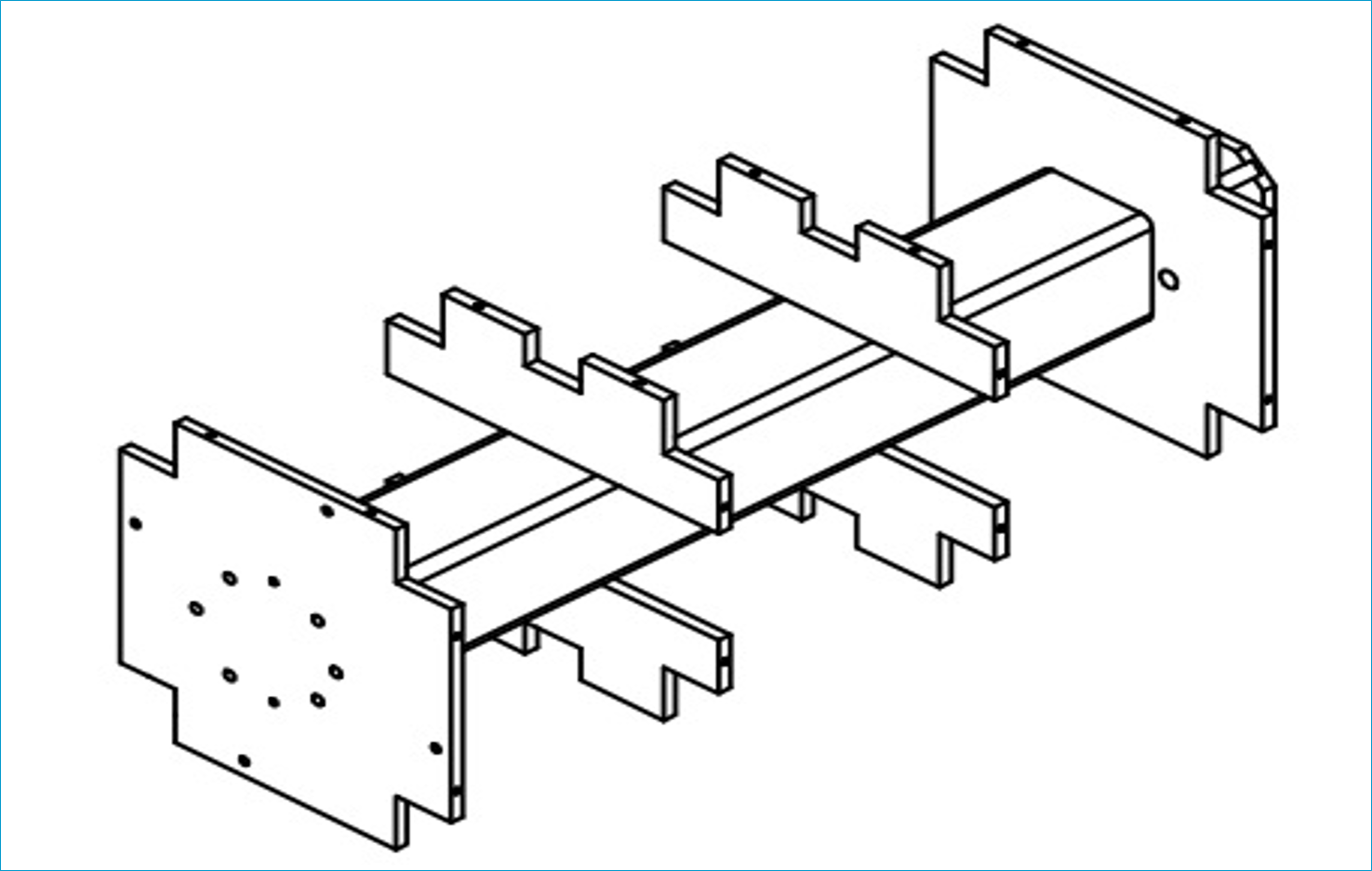
四面回转台
PLATFORM